Embedded Motor PID Controller
Production-ready PID controller implementation for embedded systems
![]()
![]()
📚 Documentation
🎯 Key Features
| Anti-Windup | Prevents integrator saturation |
| Derivative-on-Measurement | Eliminates derivative kick |
| Low-Pass Filtering | Noise reduction for derivative term |
| Cross-Platform | Builds on Linux, Windows, macOS |
| Comprehensive Tests | 12 unit tests, 100% pass rate |
📊 Example Output
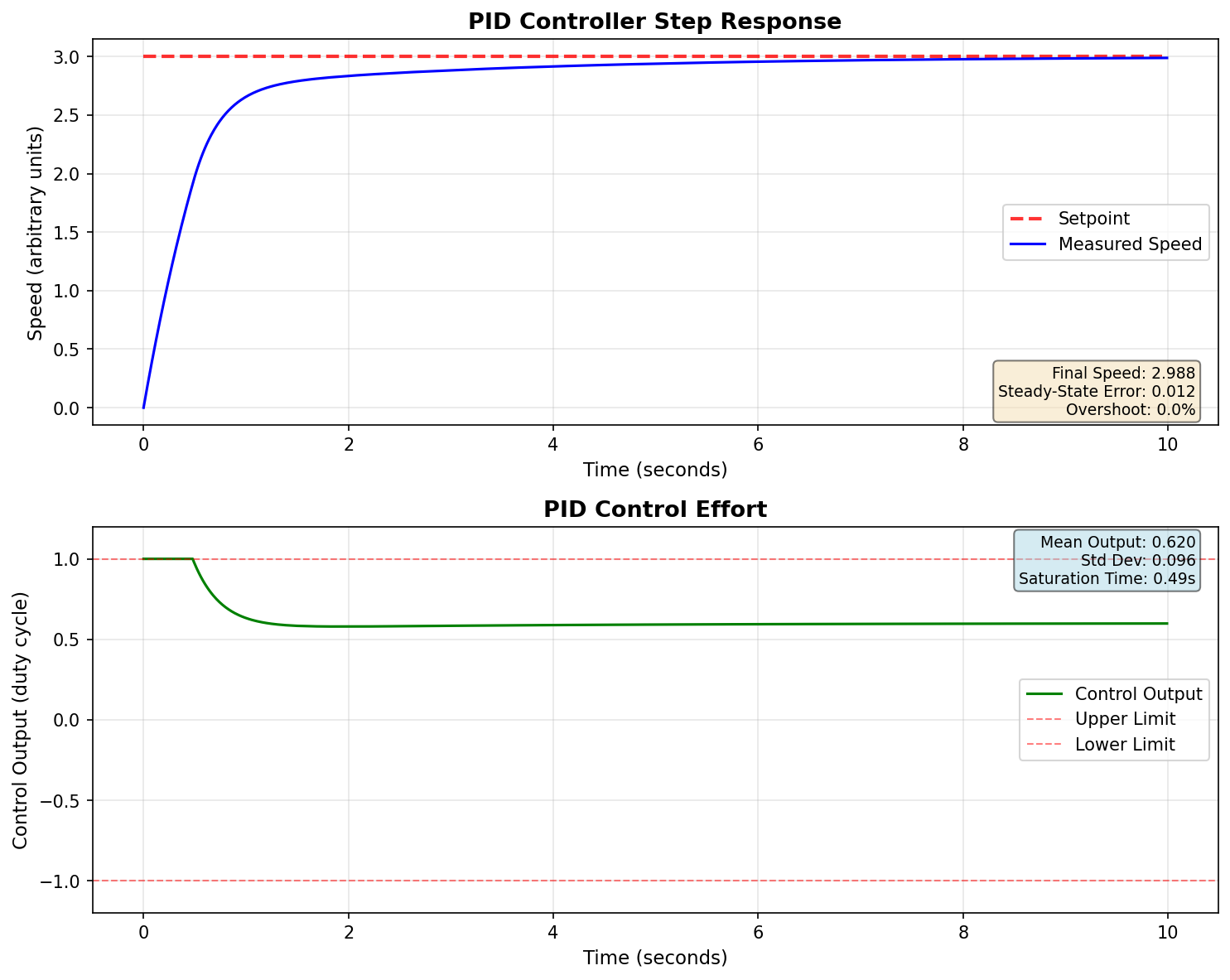
PID controller step response showing setpoint tracking and output behavior
🔗 Links
Built for the embedded systems community